Pórázterhelés kutyáknál: statikus és dinamikus terhelési állapotok
Séta közben átlagosan 37,8 N erő hat a nyakörvre (ScienceDirect 2024). Ez egy egyenletes terhelési szint: kiszámítható, viszonylag állandó és hosszabb ideig fenntartható. A modell ezt statikus terhelésnek nevezi.
Egy hirtelen megállás más állapotot hoz létre. A kutya v sebességgel mozog, a póráz megfeszül, és a mozgás hirtelen megszakad. A Δp = m · v impulzust rövid idő alatt kell elnyelni. Az eredmény nem egyenletes terhelés, hanem egy rövid erőcsúcs. A terhelési útvonal és az érintkezési terület azonos marad. Az erőszint nem.
Mindkét állapot jelen van ugyanazon a sétán. Hogy melyik dominál, az a kutya mozgásprofiljától függ. Ez a cikk a tágabb System Guide része, és a pórázterhelés viselkedését a nyakörv geometriájával kapcsolja össze.
Az F · Δt = Δp impulzus-egyenlet írja le a mögöttes mechanizmust. Rövidebb megállási idő (Δt) állandó impulzus (Δp) mellett arányosan növeli az F erő értékét. Hogy pontosan mennyivel, azt a Dinamikus Terhelési Tényező számszerűsíti a harmadik szakaszban.
Mért erőértékek kutyanyakörv esetén
Minden pórázból érkező erő ugyanazt a szerkezeti útvonalat járja be: a D-gyűrűtől mint erőbevezetési ponttól a nyakörv szalagján át a kontaktívig, ahol a nyak reakcióereje felveszi a terhelést. Ez az útvonal szerkezetileg invariáns. A statikus és dinamikus terhelések nem módosítják az útját. Csak az erő nagysága változik.
Kísérőkutyákon végzett műszeres vizsgálatok határozták meg ezt a spektrumot. Az alábbi áttekintés megmutatja, hogyan különbözik a három terheléstípus a mért erőtartomány, a megállási idő és a Dinamikus Terhelési Tényező (DTT) tekintetében.
| Terheléstípus | Erőtartomány | Megállási idő (Δt) | DTT |
|---|---|---|---|
| Statikus (egyenletes húzás) | 20–80 N (átlag 37,8 N) | folyamatos (Δa ≈ 0) | 1× (referencia) |
| Dinamikus, enyhe (kontrollált rántás) | 100–165 N (mért csúcs: 162,8 N) | ~100–200 ms | ~3–5× |
| Dinamikus, erős (sprint a póráz végéig) | 200–413 N (mért maximum: 412,5 N) | <100 ms (terhelési sebesség: 2868,7 N/s) | ~10×-ig |
| Minden erőérték kísérőkutyákon végzett műszeres vizsgálatokból származik. Mérnöki definíció szerint a DTT > 2 lökésterhelésnek minősül. Megállási idő: a terhelési sebességadatokból becsült időablakok (Townsend et al., 2026). | |||
A 3–5×-ös DTT azt jelenti: ugyanaz a nyakörv-rendszer rántás esetén három-ötször akkora erőt közvetít az egyenletes húzáshoz képest — ugyanazon a terhelési útvonalon.
Forráskontextus: ScienceDirect 2024 — instrumented walk, companion dogs; Townsend et al., 2026, Annals of Biomedical Engineering.
A ~10×-es DTT-plafon a modell felső határát jelöli, a 2868,7 N/s terhelési sebességből extrapolálva (Townsend et al. 2026). Azt, hogy hogyan viselkedik a terhelési útvonal, amikor az erő nem a nyakörvön, hanem a hámon fut át, a Terhelési útvonal összehasonlítása: nyakörv és hám mutatja be.
Dinamikus Terhelési Tényező (DTT)
A Dinamikus Terhelési Tényező a csúcserő és a statikus alapterhelés arányát számszerűsíti: DTT = Fpeak / Fstatic. Fizikai alapja az F · Δt = Δp impulzus-egyenlet, átrendezve: F = Δp / Δt.
Ha a megállási idő (Δt) csökken, a csúcserő (F) arányosan növekszik — azonos Δp impulzus mellett. Ez a modell szerkezeti alapszabálya.
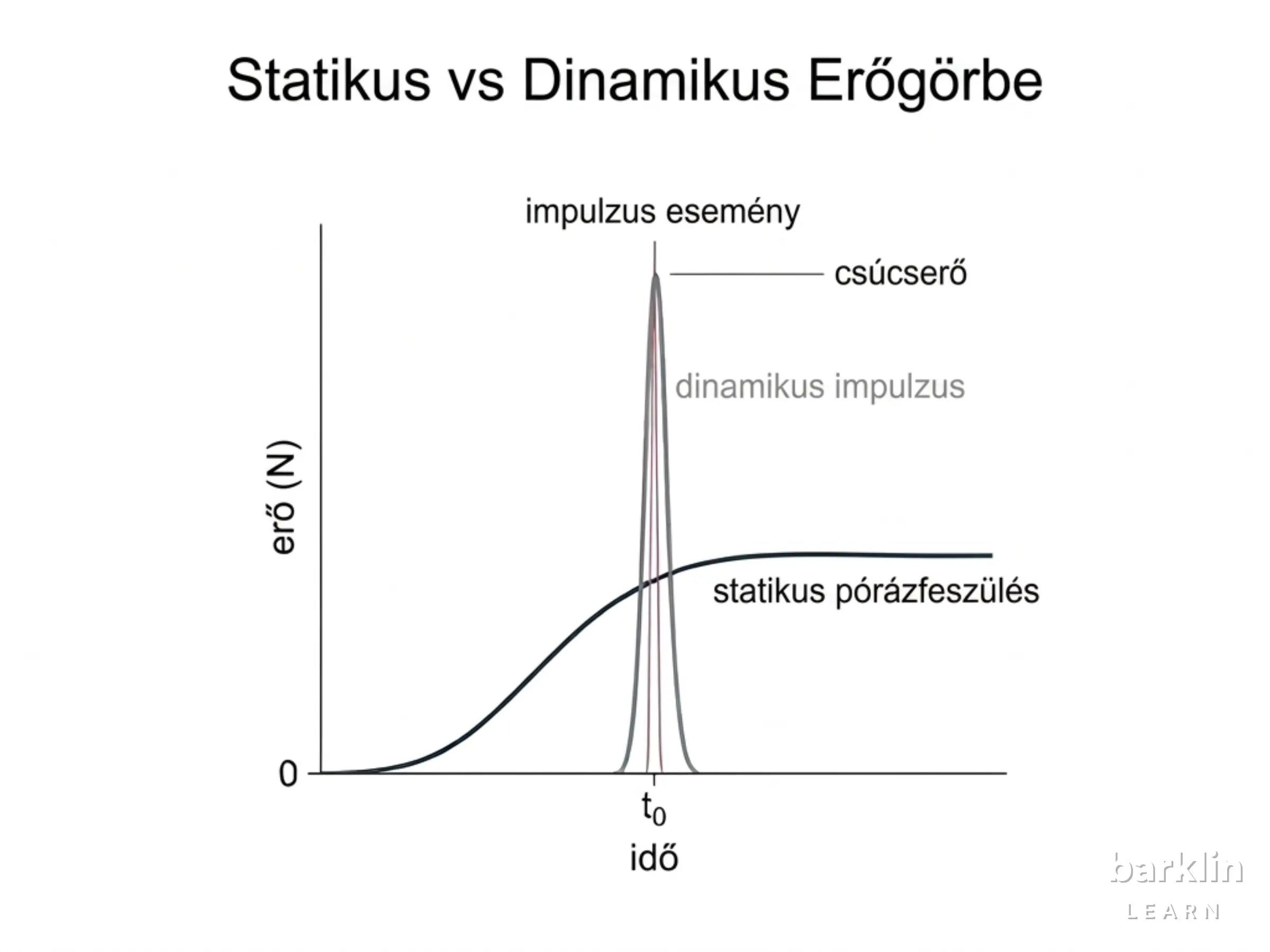
Nemcsak maga az erő számít, hanem az az idő is, amely alatt felépül. A 2. diagram az egyszerűsített impulzusmodellt szemlélteti: a hosszabb megállás széles, mérsékelt erőgörbét eredményez. A rövidebb megállás keskeny, nagyon magas csúcsot hoz létre.

Ha a megállási idő rövidül, a csúcserő nő. Állandó Δp = m · v impulzus mellett ez nem változó, hanem fizikai törvényszerűség.
Mért értékekkel szemléltetve: a statikus alapterhelés 37,8 N (ScienceDirect 2024). Kontrollált rántásnál ez 162,8 N-re emelkedik (ScienceDirect 2024), ami ~4,3×-os DTT. Egy intenzív sprint végén mért 412,5 N (Townsend et al. 2026) pedig extrém esetben ~10×-es DTT-t jelent.
Ez nem az eszköz hibája.
Három tényező kedvez a magas DTT-értékeknek: (1) a kutya nagy sebessége a megállás előtt, (2) a feszesen tartott póráz kevés holtjátékkal, és (3) a nagyon rövid féktávolság, amely a Δt értékét nullához közelíti. A kötélmechanikában az esési tényező hasonlóan írja le a rendszerterhelést. A pórázrendszerben nem az erő önmagában, hanem az impulzus és a megállási idő aránya határozza meg a csúcsterhelést.
DTT > 2 felett az esemény mérnöki szempontból lökésterhelésnek minősül. A hétköznapi, enyhébb rántások — amikor a kutya megindul valami felé vagy irányt vált — rendszeresen ebbe a tartományba esnek.
Maga a terhelési útvonal nem változik. A 3. diagram mutatja: az erő a D-gyűrűnél lép be, és a nyakörv szalagján keresztül adódik át a kontaktívre.

A statikus és dinamikus terhelések ugyanazon a geometriai úton haladnak. Csak az F értéke változik, az útvonal nem.
Terheléstípusok összehasonlítása
A két terheléstípus időbeli lefutása nem hasonló. A statikus húzás lassú erőnövekedést mutat egy stabil platóig, amely másodpercekig vagy percekig fenntartható. A dinamikus impulzus meredek emelkedést, nagyon rövid csúcsot és gyors lecsengést hoz létre — ugyanazon a terhelési útvonalon.
Carter et al. (2020, Veterinary Record) műszeres vizsgálatai 83–832 kPa közötti nyomásértékeket mértek a nyakörv típusától és az erőtől függően. Ez a tartomány fontos viszonyítási pont: rávilágít arra, hogy a nyomásszint két fő változótól függ — az F erőtől és az A érintkezési felülettől. Az alábbi táblázat azt mutatja, hogyan befolyásolja a nyakörv szélessége az érintkezési felületet és ezzel a nyomásszintet különböző terhelési helyzetekben.
| Nyakörv szélessége | Érintkezési felület (A, kb.) | Nyomásszint — statikus | Nyomásszint — dinamikus (DTT 3–5×) |
|---|---|---|---|
| Keskeny (≤ 2 cm) | kicsi | magas | nagyon magas |
| Közepes (3 cm) | közepes | közepes | magas |
| Széles (≥ 4 cm) | nagy | alacsony | közepes |
A szélesebb érintkezési felület ugyanazt az erőt nagyobb területen osztja el. Ez igaz a statikus alaphelyzetre, és még hangsúlyosabb a dinamikus csúcsértékeknél.
A megadott szintek (alacsony / közepes / magas / nagyon magas) viszonylagosak. Az abszolút kPa-értékek a nyakkerülettől, a nyak formájától és az erő mértékétől függenek, ezért nem általánosíthatók minden kutyára. A fajtánként eltérő geometriát az Agár nyakanatómiája és a széles nyakörvek mutatja meg.
Nyakörvgeometria és terhelési csúcsok
Itt válik a kérdés geometriaivá. Ha a dinamikus csúcsterhelések a statikus érték 3–10×-esét is elérhetik, akkor a nyakörv érintkezési felülete szerkezetileg releváns változóvá válik.
Az összefüggés: P = F / A. Itt P az átlagos felületi nyomás, F a pórázerő, A pedig az érintkezési felület — amelyet a nyakörv szélessége és a kontaktív határoz meg. Ha A nő, P azonos erő mellett csökken. Kétszeres nyakörvszélesség esetén az érintkezési felület ennek megfelelően nő. Az átlagos felületi nyomás csökken, miközben az erő változatlan marad.
Azonos pórázterhelésnél az érintkezési felület határozza meg, mennyire koncentrált a helyi terhelés. A 4. diagram ezt a kapcsolatot mutatja egy 2 cm-es és egy 4 cm-es nyakörv esetén azonos pórázerő mellett.

A nagyobb érintkezési felület a P = F / A összefüggés szerint csökkenti az átlagos felületi nyomást, statikus terhelésnél és még inkább dinamikus csúcsértékeknél, mert ugyanaz a felület ilyenkor többszörös F értéket visz.
Ez statikus és dinamikus terhelésre egyaránt igaz: egy szélesebb nyakörv a 37,8 N-os statikus húzást nagyobb felületen osztja el, és ugyanez a geometria a 162,8 N-os rántást is nagyobb felületen vezeti át — kevésbé pontszerűen terhelve a nyak ventrális régióját.
A P = F / A összefüggés a mérsékelt pórázesemények lineáris tartományában (< 200 N) érvényes. Extrém sprint-megállási eseményeknél (> 300 N) felléphet az úgynevezett edge-loading jelenség, vagyis a terhelés a kontaktív peremzónáira koncentrálódik. A geometriai nyomásmodell részletesebb magyarázatát a Nyomáseloszlás kutyanyakörveknél mutatja be. A továbblépéshez a termékszintre innen lehet eljutni: széles kutyanyakörvek 4 cm-től.
Rendszerhatárok
Ez a modell síkszerű nyakgeometriát, meghatározott kontaktívet és a P = F / A lineáris érvényességi tartományát feltételezi. Több változó ezen a határon kívül esik.
Nem modellezi a testtartást és a nyak mozgását a húzási esemény alatt. A szőrzet, az aljszőrzet és az egyedi bőrvastagság szintén kívül esik ezen a geometriai modellen. Az egyéni anatómiai eltérések — például a nyak formája vagy az izomtömeg — ezen a modellen belül nem oldhatók fel.
A cikk nem modellezi az anyagfáradást ismételt dinamikus terhelés alatt, és nem tárgyalja az egymást követő rántásokból adódó felhalmozott terhelést sem. A hám terhelési útvonalai szintén kívül esnek ennek a nyakörv-alapú modellnek a hatókörén.
Az edge-loading körülbelül 300 N felett a modell határesetét jelöli, nem pedig teljesen feloldott állapotát. A fajtára és méretre specifikus anatómiai adatok szintén kívül esnek a jelenlegi hatókörön, ahogy a fajtánkénti abszolút kPa- vagy Newton-értékek is. A nyakörvszélesség szerinti termékajánlások nem részei ennek a cikknek.